Customer 01
Pineapple Farm
92G7+G64 Dong Thap, Vietnam
Stronger Communities · Scientific Progress
A low-cost rodent-inspired micro-robot for early crop stress monitoring in smallholder greenhouses and high-bed farms.
RiceRat AI moves close to the ground through narrow greenhouse rows, collecting crop images and microclimate data via a front RGB camera, retractable slim soil moisture probe, and side vent sensors — then uses lightweight AI to warn growers early about dry zones and stressed plants.
RiceRat AI is designed to support smallholder farmers and farming communities that operate in space-constrained agricultural environments where conventional smart farming solutions are often impractical or unaffordable. The primary beneficiaries include:
These groups face a difficult trade-off: they need timely crop monitoring to reduce losses and improve productivity, but they cannot easily afford drones, dense sensor networks, or complex farm management systems. RiceRat AI is aimed at users who need a practical, low-cost, and understandable tool rather than a highly expensive automation platform.



RiceRat AI addresses Google's focus area of Stronger Communities, with a secondary contribution to Scientific Progress through embodied AI, mobile sensing, and lightweight predictive analytics in agriculture.
This challenge is especially relevant in Vietnam and Southeast Asia, where agriculture remains dominated by small-scale producers. In the Asia-Pacific region, family farmers produce about 80% of the region's food, and the region is home to 70% of the world's family farmers. In Vietnam, farming is highly fragmented: FAO reports around 10.3 million farmer households, with small family farms averaging only about 0.4 hectares, while farms under 0.5 hectares account for nearly 70% of agricultural landholdings and often have the weakest access to digital infrastructure and services [1].
Although smart agriculture is widely discussed in Vietnam as a way to improve decisions, reduce costs, and raise labor productivity, adoption remains uneven — especially where farms are small, resources are limited, and new technologies must deliver clear practical value quickly [2],[3].
The problem is particularly visible in greenhouse and high-bed cultivation. Lam Dong had 5,688.48 hectares of greenhouse area by end of Q1 2024, including nearly 2,900 hectares in Da Lat alone. Yet farmers still rely heavily on manual crop checking, even though conditions can vary sharply over short distances due to microclimate differences, uneven irrigation, and localized soil moisture deficits.
Existing solutions do not fully fit. Drones are impractical in narrow or covered spaces. Fixed sensors measure only a few points. Meanwhile, the Central Highlands faces a long dry season, outdated irrigation, and only 26% irrigation coverage, while severe droughts from 2014 to 2024 caused substantial crop losses.
The challenge is not simply a lack of data, but a lack of affordable, fine-grained, actionable monitoring in small, space-constrained farming environments. This is precisely the gap RiceRat AI fills: a low-cost mobile sensing platform for settings where drones are inconvenient, fixed sensors are too sparse, and manual inspection is too slow.

 System Blueprint
System Blueprint
 AI Workflow Pipeline
AI Workflow Pipeline
The visuals above represent our intended design concept. No physical hardware has been built yet — there are no technical drawings or engineering specifications at this stage.
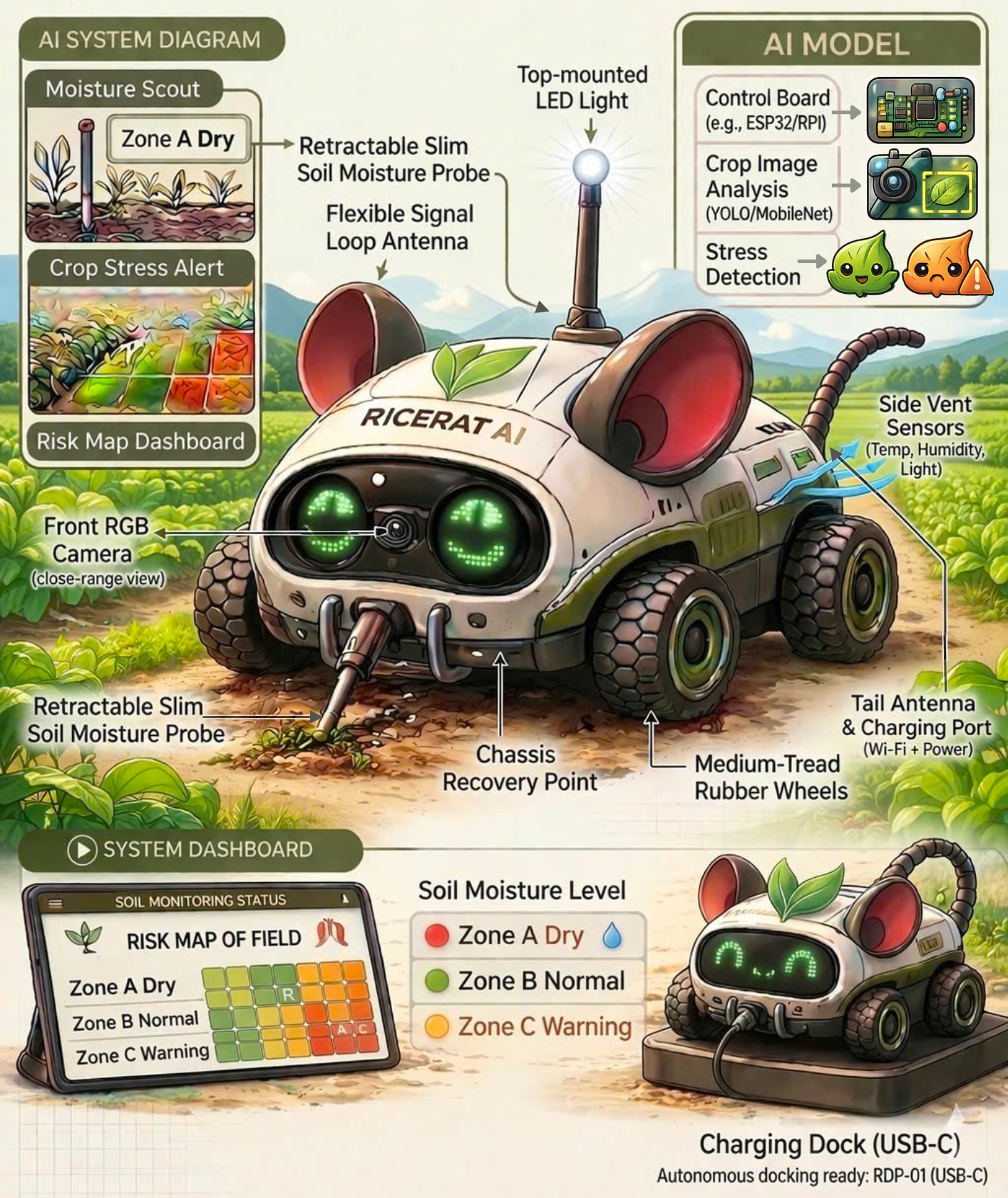
Measures soil moisture, temperature, humidity, and light at repeated checkpoints.
Flags yellowing, curling, or uneven growth from RGB images and sensor data.
Shows which zones are dry, normal, warning, or need checking.
RiceRat AI is a low-cost rodent-inspired micro-robot designed for greenhouses and high-bed farms. It moves close to the ground on Medium-Tread Rubber Wheels and collects localized field data through a Front RGB Camera, a Retractable Slim Soil Moisture Probe for moisture and temperature, Side Vent Sensors for air temperature, humidity, and light, and an onboard Control Board (ESP32/RPI). A Top-mounted LED Light supports low-light operation, while a Flexible Signal Loop Antenna and a Tail Antenna & Charging Port (Wi-Fi + Power) keep the robot connected and rechargeable via a Charging Dock (USB-C). A Chassis Recovery Point allows easy manual retrieval when needed. The system combines crop image analysis with environmental sensing because stress is rarely captured by one signal alone. By following repeated routes, it generates consistent observations from the same rows and checkpoints.
The first version uses lightweight and explainable models — YOLO, MobileNet, or ResNet for crop image analysis, and SVR for sensor-based moisture estimation. During the pilot phase, fusion models such as Extra Trees, Random Forest, or XGBoost will combine image-derived features with sensor readings once paired local data is available. Public datasets bootstrap development, while the system adapts using local pilot data labeled as dry, normal, warning, or needs checking — human-annotated categories that complement the computed Stress Score (σ) bands (Healthy, Mild, Moderate, High, Critical).
Preliminary experiments validate each module of the stress-monitoring pipeline before pilot deployment.
Crop Stress Alert. Four image classifiers were benchmarked on PlantVillage (15 classes) and Paddy Doctor (10 classes). YOLO11s leads at 99.88 % accuracy on PlantVillage, while MobileNetV3 Small offers a lighter alternative better suited to the robot’s modest hardware — trading some accuracy for significantly higher throughput during real-time patrol.
Open-set robustness. In real fields, early stress symptoms may not match any labelled disease class. To handle this, the pipeline adds an anomaly-detection stage: Mahalanobis-distance scoring on MobileNetV3 Small embeddings achieves ROC-AUC = 97.26 % on PlantVillage and 87.15 % on Paddy Doctor, letting the robot flag unseen abnormalities for human review instead of force-fitting them into a known class.
Moisture Scout. An early forecasting baseline on a public soil-moisture time-series shows all models clustering near the mean-predictor level (R² ≈ 0). This confirms what the proposal already assumes: public remote-sensing proxies alone cannot capture local moisture patterns — the real value of RiceRat lies in collecting ground-truth probe readings along repeated patrol routes. The pilot phase will replace these proxies with in-situ sensor data where meaningful forecasting becomes feasible.
Sensor-to-map pipeline. The current Stress Score (σ) is computed entirely from sensor signals (moisture, VPD, temperature). Visual disease output feeds a separate alert flag on the Risk Map Dashboard, and multi-modal fusion of both streams is planned for the pilot iteration.
Decision-support extension. Although yield prediction is not part of the robot’s first operational loop, a yield-regression experiment shows that the environmental features RiceRat collects also carry long-term predictive value (Extra Trees R² = 0.9905 across 55 crop types; rice-only LightGBM R² = 0.6425). This opens a path from early-warning monitoring toward broader decision-support in future versions.
At each checkpoint the robot records four sensor readings — soil moisture, air temperature, relative humidity, and soil temperature — and combines them into a single Composite Stress Score σ on a 0-to-100 scale. The score is a weighted sum of three sub-scores, each capturing a different type of crop stress [4]:
Every sub-score is clamped to the 0 – 1 range by a clip(x) = min(max(x, 0), 1) function, so that 0 always means no stress and 1 always means maximum stress. The three components are described below.
Soil moisture receives the largest weight (55 %) because water deficit is the primary yield-limiting factor in rice [5], followed by VPD (25 %) and temperature (20 %). The resulting σ maps to five action bands:
Four public datasets used to bootstrap early model training and validate prediction pipelines before pilot data collection.
| Dataset | Type | Size | Classes / Features | Prediction Task |
|---|---|---|---|---|
| Paddy Doctor | Image | 16,225 | 10 classes | Rice disease classification |
| PlantVillage | Image | 54,303 | 15 classes | Multi-crop disease classification |
| Crop Yield | Tabular | 19,689 | 14 features | Yield regression |
| Soil Moisture | Time-series | 8,761 | 64 features | Moisture forecasting |
Four image classifiers benchmarked for disease / stress recognition across PlantVillage (15 classes) and Paddy Doctor (10 classes), ranked by accuracy.
| Model | Accuracy ▲ | Macro F1 ▲ | Img/s ▲ |
|---|---|---|---|
| YOLO11s | 99.88% | 99.90% | 42.46 |
| ResNet18 | 98.28% | 98.23% | 11.99 |
| YOLO11n | 98.18% | 98.37% | 96.37 |
| MobileNetV3 Small | 96.49% | 96.07% | 107.25 |
| YOLO11n | 97.36% | 97.02% | 61.96 |
| YOLO11s | 97.31% | 97.21% | 34.26 |
| ResNet18 | 95.44% | 95.04% | 31.46 |
| MobileNetV3 Small | 91.69% | 90.54% | 45.08 |
Open-set anomaly detection on MobileNetV3 Small embeddings, trained on healthy images only, ranked by ROC-AUC.
| Method | ROC-AUC ▲ | F1 ▲ | Precision ▲ | Recall ▲ |
|---|---|---|---|---|
| Mahalanobis | 97.26% | 93.88% | 99.77% | 88.64% |
| PCA Reconstruction | 96.99% | 92.36% | 99.79% | 85.96% |
| Local Outlier Factor | 96.88% | 92.63% | 99.82% | 86.41% |
| One-Class SVM | 92.88% | 88.00% | 99.83% | 78.67% |
| Diagonal Gaussian | 92.48% | 85.17% | 99.75% | 74.31% |
| Centroid Distance | 92.48% | 85.17% | 99.75% | 74.31% |
| Isolation Forest | 92.30% | 82.56% | 99.72% | 70.44% |
| SGD One-Class SVM | 9.82% | 1.14% | 71.43% | 0.57% |
| Mahalanobis | 87.15% | 73.41% | 99.49% | 58.16% |
| PCA Reconstruction | 84.00% | 69.52% | 99.35% | 53.47% |
| Local Outlier Factor | 81.40% | 58.42% | 99.42% | 41.36% |
| One-Class SVM | 70.66% | 58.19% | 99.33% | 41.14% |
| Diagonal Gaussian | 69.73% | 45.11% | 99.17% | 29.19% |
| Centroid Distance | 69.73% | 45.11% | 99.17% | 29.19% |
| Isolation Forest | 69.39% | 44.04% | 99.07% | 28.31% |
| SGD One-Class SVM | 34.14% | 3.03% | 89.26% | 1.54% |
Early baseline for soil-moisture forecasting on the Mendeley dataset, ranked by RMSE.
| Model | Family | RMSE ▲ | R² ▲ | MAPE ▲ |
|---|---|---|---|---|
| SVR-RBF | Regression | 38.91 | −0.0015 | 57.68% |
| Moving Average 168h | Time Series | 39.00 | −0.0058 | 60.28% |
| CatBoost | Regression | 39.01 | −0.0067 | 60.37% |
| Extra Trees | Regression | 39.09 | −0.0108 | 61.20% |
| Elastic Net | Regression | 39.11 | −0.0116 | 62.52% |
| Lasso | Regression | 39.11 | −0.0120 | 62.47% |
| Linear Regression | Regression | 39.15 | −0.0138 | 62.60% |
| Ridge | Regression | 39.15 | −0.0138 | 62.65% |
| Random Forest | Regression | 39.48 | −0.0309 | 63.85% |
| KNN | Regression | 39.65 | −0.0401 | 60.10% |
| Moving Average 24h | Time Series | 39.81 | −0.0484 | 61.12% |
| LightGBM | Regression | 39.83 | −0.0493 | 61.09% |
| HistGradientBoost | Regression | 40.35 | −0.0771 | 65.06% |
| Moving Average 6h | Time Series | 41.78 | −0.1543 | 62.31% |
| Exponential Smoothing | Time Series | 42.15 | −0.1753 | 63.16% |
| XGBoost | Regression | 42.89 | −0.2169 | 73.13% |
| Seasonal Naive 168h | Time Series | 55.08 | −1.0070 | 76.86% |
| Naive Last Value | Time Series | 55.36 | −1.0272 | 77.11% |
| Seasonal Naive 24h | Time Series | 56.34 | −1.0992 | 78.62% |
| Local Drift 24h | Time Series | 56.61 | −1.1195 | 78.68% |
Yield regression on the Kaggle crop dataset — all 55 crop types and rice-only subset, ranked by RMSE.
| Model | RMSE ▲ | R² ▲ | MAPE ▲ |
|---|---|---|---|
| Extra Trees | 88.59 | 0.9905 | 19.27% |
| CatBoost | 99.49 | 0.9880 | 21.19% |
| XGBoost | 102.79 | 0.9872 | 43.85% |
| Random Forest | 112.55 | 0.9847 | 24.66% |
| Linear Regression | 116.62 | 0.9836 | 64.08% |
| LightGBM | 121.18 | 0.9823 | 45.52% |
| Elastic Net | 121.25 | 0.9822 | 64.28% |
| Lasso | 121.52 | 0.9822 | 67.22% |
| Ridge | 121.54 | 0.9822 | 63.12% |
| HistGradientBoost | 123.92 | 0.9814 | 40.99% |
| KNN | 250.87 | 0.9241 | 62.79% |
| SVR-RBF | 408.97 | 0.7980 | 66.02% |
| LightGBM | 0.50 | 0.6425 | 7.60% |
| HistGradientBoost | 0.52 | 0.6047 | 8.12% |
| XGBoost | 0.53 | 0.5953 | 7.81% |
| CatBoost | 0.53 | 0.5899 | 7.76% |
| Extra Trees | 0.54 | 0.5795 | 8.35% |
| Random Forest | 0.54 | 0.5779 | 8.86% |
| Elastic Net | 0.57 | 0.5207 | 13.48% |
| Ridge | 0.58 | 0.5089 | 12.68% |
| Linear Regression | 0.58 | 0.5032 | 12.73% |
| Lasso | 0.60 | 0.4854 | 15.56% |
| KNN | 0.76 | 0.1633 | 26.50% |
| SVR-RBF | 0.82 | 0.0192 | 29.52% |
The interactive simulation below runs the full pipeline described above on a 9 × 12 greenhouse grid. As the micro-robot patrols path cells, each adjacent plant triggers the three-stage cycle — sensor collection, SVR-RBF moisture prediction, and MobileNet disease classification — then computes the Stress Score (σ) and streams results to the Console, Plant Scanner panel, and Stress Heatmap in real time.
RiceRat AI is feasible because its first pilot is intentionally narrow, practical, and low-risk. The system does not require full autonomy at the beginning. Instead, it can operate on a guided or semi-guided route within one greenhouse or high-bed site, allowing repeated data collection and AI-assisted alerts without the complexity of full robotic navigation. This makes the project more realistic for a youth-led implementation within a short timeline.
The pilot context is also realistic. Lam Dong already has a large greenhouse base and a strong high-tech agriculture ecosystem, while Da Lat alone accounts for nearly 2,900 hectares of greenhouse cultivation. This provides a suitable environment for testing a low-cost robot designed for spaces where drones are inconvenient and fixed sensors are too sparse.
RiceRat AI also aligns with broader smart agriculture efforts in Vietnam and Asia, where digital tools are increasingly promoted to improve productivity, sustainability, and farmer decision-making. Its strength is that it does not require users to adopt a complex digital ecosystem. Instead, it offers one concrete and understandable service: repeated mobile crop scouting with simple AI alerts [2],[3].
The pilot follows a focused three-month timeline designed to move from first hardware assembly to a working field evaluation, keeping each phase narrow enough to stay realistic for a youth-led team.
Design the chassis, integrate camera and baseline sensors, operate manually or semi-autonomously, and capture first image and moisture data from the pilot site.
Build the monitoring dashboard, train baseline irrigation and stress models, and test repeatable routes in one greenhouse or small garden.
Compare RiceRat outputs with manual checks, measure false-alert rates, and improve warning logic before broader deployment.
Potential pilot partners include university experimental farms, greenhouse vegetable farms in Lam Dong, and educational farms near Ho Chi Minh City. A pineapple farm and a water spinach farm in Dong Thap have already confirmed interest, giving the project its first real-world validation sites.
Customer 01
92G7+G64 Dong Thap, Vietnam
Customer 02
92G7+HMW Dong Thap, Vietnam
RiceRat AI is designed to scale through replication rather than heavy infrastructure. This is important in Vietnam, where farms are small and fragmented. When average family farms are only around 0.4 hectares and many landholdings are under 0.5 hectares, the most scalable solutions are not those built for large uniform farms, but those that can work plot by plot, bed by bed, and greenhouse by greenhouse. Because RiceRat AI uses only widely available, low-cost components and requires no cloud infrastructure or proprietary software, replication is straightforward for cooperatives, schools, or youth groups with limited budgets.
Its impact can be expected at several levels. At the farm level, RiceRat AI can reduce daily manual scouting time, increase the number of monitored points, and help farmers respond earlier to dry or abnormal crop zones. At the community level, it can provide cooperatives, educational farms, and youth groups with a practical example of how AI can support agriculture in a useful and understandable way. At the regional level, the concept can be adapted to other Southeast Asian contexts where smallholder farming, climate pressure, and protected cultivation are common.
Beyond the pilot, the project can sustain itself through an open hardware and software design, enabling local communities to build, maintain, and adapt the platform on their own. This approach ensures that the technology remains accessible and does not depend on continued external funding to deliver value.
To evaluate whether the pilot achieves its goals, several practical indicators can be tracked during and after deployment:
The outreach goal is to reach at least 1,000 community members through a mix of in-person activities and digital education, using RiceRat AI as a relatable example of practical and responsible AI. The key message is that AI does not have to mean expensive black-box systems — it can also mean affordable tools that help communities make better decisions in farming and resource management.
This plan is realistic because it combines physical engagement with digital reach and uses the prototype itself as a teaching tool. That makes AI less abstract and more accessible, especially for students, young builders, and smallholder communities.
We are undergraduate research assistants at the URA Research Group, working under the supervision of Prof. Quan Thanh Tho, Dean of the Faculty of Computer Science and Engineering, Ho Chi Minh City University of Technology (HCMUT), Vietnam. Together, we have participated in numerous research projects, real-world applications, and academic competitions. Our team, URAx, has received multiple awards in innovation and research contests at both national and international levels. Driven by a shared belief that AI should be accessible, affordable, and built for real-world impact, we developed RiceRat AI as a practical solution for small-scale agriculture.
AI Researcher
AI Researcher
AI Engineer
